The Learning Autonomous Service Robots (LASR) team consists of students competing in service robot challenges at major competitions.
LASR is the incarnation of the Sensible Robots research, and at the same time gives our undergraduate and master’s students a chance to do real-world robot programming.

Members
The team is led by Matteo Leonetti, with the help of his colleague Gerard Canal. Current student members are (in order of appearance in our lives): Jared Swift, Nicole Lehchevska, Peter Tisnikar, Zoe Evans, Pawel Makles, and Yousef Altaher.
Competitions
RoboCup 2024 qualification material
- Team Description Paper
- Video
- Old Videos are at this youtube channel
- Publications are in the research page and on google scholar.
European Smart City Robotics Competition 2023
Our team competed in the Coffee Shop and Elevator episodes of the European Smart City Robotics Competition hosted in Milton Keynes. We took home the ‘Best Team’ award (joint with b-it-bots) along with first place in both episodes.
 |  |
We also made several media appearances including the BBC’s One Show (YouTube clip).
RoboCup@Home 2022
In 2022 we participated in our first in-person RoboCup! Matteo had just moved from the University of Leeds to King’s College London, and the team was half from Leeds and half from KCL.
 |  |
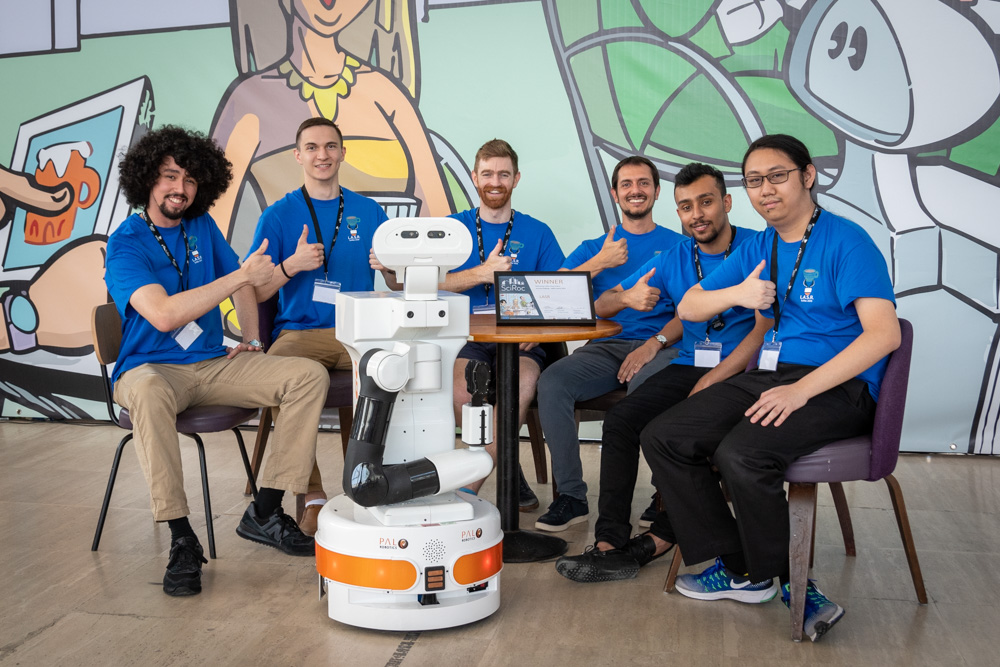
SciRoc 2019
We won first place in the Deliver Coffee Shop Orders episode of the 1st SciRoc Challenge, and third place in the Take the Elevator episode.
 |  |
You can watch the full coffee shop run here on YouTube.
Software
Our LASR team publishes their current ongoing work at github.com/LASR-at-Home.
The following packages are currently in use, maintained, and available to the community:
| Contribution | Software | Description |
|---|---|---|
| ROS Package | PCL Segmentation | Offers useful services for cropping/segmenting point clouds. |
| ROS Package | ROS Documentation Generator | Allows to generate and visualise documentation of ROS packages. |
| ROS Package | Waiting Position Narrow Space Nav | Two packages implementing our winning approach to navigation in narrow spaces, used for the Elevator episode in the Smart Cities Challenge 2023. Waiting position computes a height map to identify the best location to position the robot in a narrow space and surrounded by people. Narrow Space Nav moves the robot in a narrow and crowded environment. |
| ROS Package | Whisper from Mic | Transcribes directly from microphone input |
| Contributed to | ROS Plan | We contributed to and use ROS Plan (part of a larger project at King’s College London) |
Below you can find historical software releases by the LASR team.
| Contribution | Software | Description |
|---|---|---|
| Library | actasp | With colleagues at UT Austin, we developed the actasp library for integrated reinforcement learning, reasoning, planning, and execution monitoring in Answer Set Programming (as part of this work). The library enables both the bwi_kr_execution and plan_execution packages in the BWI system, made publicly available by the group at UT. The code is platform independent and can be used on any robot, through implementing appropriate actions. |
| Contributed to | Petri Net Plans | We contributed the learning extension of Petri Net Plans, maintained by the SPQR team at Sapienza. |