Our research revolves around robot behaviour. We design systems and algorithms to bring useful autonomous robots in our everyday life, capable of long-term, rational, and adaptive behaviour. Here, we summarise our research lines. A full list of publications is available on Google Scholar, and Research Gate.
Curriculum Learning in Reinforcement Learning
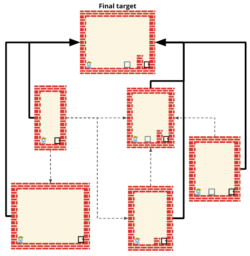
Humans teach every task of significant complexity by breaking it down into a series of simpler tasks, of increasing difficulty, for the student to go through as their skills progress. Our striking ability to generalize allows us to understand the underlying principles of a problem on a simple instance, and then to apply them to a much more complex one. We study how this form incremental learning can be applied to autonomous agents, and how the agents can design their own curriculum for a particular target task.
Publications
- Curriculum Learning for Reinforcement Learning Domains: A Framework and Survey (pdf)
- Curriculum learning with a progression function (pdf)
- Curriculum learning for cumulative return maximization (pdf)
- An optimization framework for task sequencing in curriculum learning (pdf)
- A gray-box approach for curriculum learning (pdf)
- Automatic Curriculum Graph Generation for Reinforcement Learning Agents (pdf),
- Source Task Creation for Curriculum Learning (pdf),
- Learning inter-task transferability in the absence of target task samples (pdf).
Meta-Reinforcement Learning
In meta-reinforcement learning the objective is to gather information over multiple tasks so as to speed up learning in new, similar tasks. We considered the problem of learning from a small sample of training tasks, and the use of meta-RL to form heuristics for planning.
Publications
Adaptive Learning (or Planning & Learning Frameworks)
We combine planning and learning techniques, especially reinforcement learning, to achieve systems that plan faster and get better at multiple tasks over time.
Publications
On motion planning, especially for manipulation (in collaboration with Mehmet Dogar):
- Human-like planning for reaching in cluttered environments (pdf)
- Occlusion-Aware Search for Object Retrieval in Clutter (pdf)
- Learning image-based Receding Horizon Planning for manipulation in clutter
- Learning Physics-Based Manipulation in Clutter: Combining Image-Based Generalization and Look-Ahead Planning (pdf)
- Planning with a Receding Horizon for Manipulation in Clutter using a Learned Value Function (pdf)
On symbolic planning and reasoning:
- BWIBots: A platform for bridging the gap between AI and human–robot interaction research (pdf)
- A synthesis of automated planning and reinforcement learning for efficient, robust decision-making (pdf)
- Planning in action language BC while learning action costs for mobile robots (pdf)
- Automatic generation and learning of finite-state controllers (pdf)